
rust写个操作系统——课程实验blogos移至armV8深度解析:实验二 Hello World
你将在每个实验对应分支上都看到这句话,确保作者实验代码在被下载后,能在正确的环境中运行。
运行环境请参考: lab1 环境搭建
cargo build |
实验二 Hello World
上一个实验里,我们已经初步实现了让内核运行一开始输出"Hello World",也初步了解到程序是如何调用硬件设备的寄存器。然而我们希望能在实验的每一个rust代码文件中,都能方便的调用print,而不是每一次输出都需要写一大串代码。
用函数模块化固然是个不错的方法,但当我们想调用它时就需要向c语言那样调用stdio.h头文件。这时候我们就需要了解rust本身的一个高级特性:宏
所以实验二我们将实现rust中最经典的宏:print!和println!,以便于后续的调试输出。
注:至于实验指导书中关于virt机器和设备树的部分,我会将其放到选做的实验三。实验三选做但是必要,是理解后续实验的关键。另外吐槽的是这节的实验指导书意外的还不错,我可以偷懒一点。
实验目的
实验二的开头是这么说的:
本实验的目的在于理解操作系统与硬件的接口方法,并实现一个可打印字符的宏(非系统调用),用于后续的调试和开发。
其实我们在not_main函数中就已经完成的对串口作了硬件上的调用,而更具体的调用则需要阅读设备树源文件和设备寄存器接口文档。这将在实验三实验四会有更实际的体现。所以实验目的我认为是如下几点(第一点其实也不太重要):
初步了解rust宏(rust语言特性,可略过)
将实验一的输出封装成实例以便调用
将实例封装成宏,实现
print!和println!
rust 宏(选看)
什么是宏?
熟悉C/C++的应该很熟悉宏(Macro)的概念,而Rust初学者也必定会接触到Rust中的宏。
可以简单地理解为:宏即编译时将执行的一系列指令。其重点在于「编译时」,尽管宏与函数(或方法)形似,函数是在运行时发生调用的,而宏是在编译时执行的。
不同于C/C++中的宏,Rust的宏并非简单的文本替换,而是在词法层面甚至语法树层面作替换,其功能更加强大,也更加安全。
如下所示的一个C++的宏SQR的定义
#include <iostream> |
我们希望它输出4,但很遗憾它将输出3,因为SQR(1 + 1)在预编译阶段通过文本替换展开将得到(1 + 1 * 1 + 1)(替换时没给你加括号),并非我们所期望的语义。
而在Rust中,按如下方式定义的宏:
macro_rules! sqr { |
将得到正确的答案4。这是因为Rust的宏展开发生在语法分析阶段,此时编译器知道sqr!宏中的$x变量是一个表达式(用$x:expr标记),所以在展开后它知道如何正确处理,会将其展开为((1 + 1) * (1 + 1))。
宏和函数的区别
从根本上来说,宏是一种为写其他代码而写代码的方式,即所谓的元编程(metaprogramming)。所有的这些宏以展开的方式来生成比你所手写出的更多的代码。
元编程对于减少大量编写和维护的代码是非常有用的,它也扮演了函数扮演的角色。但宏有一些函数所没有的附加能力。
一个函数标签必须声明函数参数个数和类型。相比之下,宏能够接受不同数量的参数:用一个参数调用println!("hello")或用两个参数调用println!("hello {}", name)。而且,宏可以在编译器翻译代码前展开,例如,宏可以在一个给定类型上实现trait。而函数则不行,因为函数是在运行时被调用,同时trait需要在编译时实现。
实现一个宏而不是一个函数的缺点是宏定义要比函数定义更复杂,因为你正在编写生成 Rust 代码的 Rust 代码。由于这样的间接性,宏定义通常要比函数定义更难阅读、理解以及维护。
宏和函数的最后一个重要的区别是:在一个文件里调用宏之前必须定义它,或将其引入作用域,而函数则可以在任何地方定义和调用。
宏的分类
宏可以分为:使用 macro_rules! 的 声明(Declarative)宏,和三种 过程(Procedural)宏:
自定义 #[derive] 宏在结构体和枚举上指定通过 derive 属性添加的代码
类属性(Attribute-like)宏定义可用于任意项的自定义属性
类函数宏看起来像函数不过作用于作为参数传递的 token
这里我们只了解声明宏。我们的print!和println!宏都是声明宏。
声明宏
Rust 最常用的宏形式是 声明宏(declarative macros)。它们有时也被称为 “macros by example”、“macro_rules! 宏” 或者就是 “macros”。其核心概念是,声明宏允许我们编写一些类似 Rust match 表达式的代码。match 表达式是控制结构,其接收一个表达式,与表达式的结果进行模式匹配,然后根据模式匹配执行相关代码。宏也将一个值和包含相关代码的模式进行比较;此种情况下,该值是传递给宏的 Rust 源代码字面值,模式用于和传递给宏的源代码进行比较,同时每个模式的相关代码则用于替换传递给宏的代码。所有这一切都发生于编译时。
可以使用 macro_rules! 来定义宏,如:
#[macro_export] |
无论何时导入定义了宏的包,#[macro_export]注解说明宏应该是可用的。 如果没有该注解,这个宏不能被引入作用域。
接着使用 macro_rules! 和宏名称开始宏定义,且所定义的宏并不带感叹号。名字后跟大括号表示宏定义体,在该例中宏名称是 vec 。
首先,一对括号包含了整个模式。接下来是美元符号($),后跟一对括号,捕获了符合括号内模式的值以用于替换后的代码。$()内则是$x:expr,其匹配Rust的任意表达式,并将该表达式记作$x。
$()之后的逗号说明一个可有可无的逗号分隔符可以出现在$()所匹配的代码之后。紧随逗号之后的*说明该模式匹配零个或更多个*之前的任何模式。
当以vec![1, 2, 3];调用宏时,$x模式与三个表达式 1、2 和 3 进行了三次匹配。
Write 实例实现和测试
实例实现
回顾实验一的main.rs代码,看看我们是如何实现输出Hello World的
const UART0: *mut u8 = 0x0900_0000 as *mut u8; |
我们向UART串口循环写入我们想输出的字符。于是我们定义一个Write结构来实现输出单个字符和字符串:
新建src/uart_console.rs,定义如下结构:
//嵌入式系统使用串口,而不是vga,直接输出,没有颜色控制,不记录列号,也没有frame buffer,所以采用空结构 |
与main.rs中的输出进行对比,便显得很容易理解。我们为Write结构实现core::fmt::Write trait(特性)。继续向文件中加入如下代码:
impl core::fmt::Write for Writer { |
由于我们实现了 write_str ,核心库会帮我们自动实现 write_fmt 。进一步了解这部分内容,可以阅读 rust 官方文档中 core::fmt::Write 部分 和 rust 官方教程中 Traits 部分。
基于Rust的core::fmt实现格式化控制,可以使我们方便地打印不同类型的变量。实现core::fmt::Write后,我们就可以使用Rust内置的格式化宏write!和writeln!,这使改结构具有其他语言运行时所提供的格式化控制能力。
测试
向main.rs中加入测试函数,并修改not_main函数
#[no_mangle] // 不修改函数名 |
cargo build后并运行进行测试
cargo build |
print!和println!封装
现在我们已经可以采用print_something函数通过串口输出字符了。但为了输出,我们需要两个步骤:
(1)创建Writer类型的实例
(2)调用实例的write_byte或write_string等函数。
为了方便在其他模块中调用,我们希望可以直接执行步骤(2)而不是首先执行上述步骤(1)再执行步骤(2)。
一般情况下可以通过将步骤(1)中的实例定义为static类型来实现
Write全局接口
我们尝试创建一个静态的WRITER变量:编辑src/uart_console.rs,新增:
pub static ref WRITER: Writer = Writer{}; |
我们尝试构建,却发生了错误。为了明白现在发生了什么,我们需要知道一点:一般的变量在运行时初始化,而静态变量在编译时初始化。Rust编译器规定了一个称为常量求值器(const evaluator)的组件,它应该在编译时处理这样的初始化工作。所以Rust暂不支持Writer这样类型的静态变量(编译时)初始化。
延迟初始化
使用非常函数初始化静态变量是Rust程序员普遍遇到的问题。幸运的是,有一个叫做
lazy_static的包提供了一个很棒的解决方案:它提供了名为lazy_static!的宏,定义了一个延迟初始化(lazily initialized)的静态变量;这个变量的值将在第一次使用时计算,而非在编译时计算。这时,变量的初始化过程将在运行时执行,任意的初始化代码——无论简单或复杂——都是能够使用的。现在我们引入
lazy_static包:编辑
Cargo.toml,向其中加入如下依赖:(在这里,由于程序不连接标准库,我们需要启用spin_no_std特性。)[dependencies.lazy_static]
version = "1.0"
features = ["spin_no_std"]然后将上述的静态变量
WRITER的定义处套一层lazy_static!宏:use lazy_static::lazy_static;
lazy_static! {
pub static ref WRITER: Writer = Writer{};
}再次编译可发现编译成功。然而,这个WRITER可能没有什么用途,因为它目前还是不可变变量
(immutable variable):这意味着我们无法向它写入数据,因为所有与写入数据相关的方法都需要实例的可变引用&mut self。一种解决方案是使用可变静态
(mutable static)的变量,但所有对它的读写操作都被规定为不安全的(unsafe)操作,因为这很容易导致数据竞争或发生其它不好的事情——使用static mut极其不被赞成,甚至有一些提案认为应该将它删除。自旋锁
要定义同步的内部可变性,我们往往使用标准库提供的互斥锁类
Mutex,它通过提供当资源被占用时将线程阻塞(block)的互斥条件(mutual exclusion)实现这一点;但我们初步的内核代码还没有线程和阻塞的概念,我们将不能使用这个类(而且我们也不能用标准库)。不过,我们还有一种较为基础的互斥锁实现方式——自旋锁
(spinlock)。自旋锁并不会调用阻塞逻辑,而是在一个小的无限循环中反复尝试获得这个锁,也因此会一直占用CPU时间,直到互斥锁被它的占用者释放。
简单的说,我们在从某个资源中读写数据知识,我们需要保证这个资源一直被我们所占用,以免被其它的读写操作修改而导致结果错误,或引发一些其他的安全性问题。(众所周知rust十分注重安全)
向
Cargo.toml加入如下依赖:[dependencies]
spin = "0.9.2"然后再次修改我们的静态变量
WRITER的定义:use lazy_static::lazy_static;
use spin::Mutex;
lazy_static! {
pub static ref WRITER: Mutex<Writer> = Mutex::new(Writer { });
}此时我们的
WRITER才能可修改的全局静态变量,为我们print!和println宏的实现做好了准备。
实现 print! 宏
现在我们可以开始实现print!和println!了。我们继续向src\uart_console.rs中写入:
#[doc(hidden)] |
函数_print和print!宏是从标准库中得到的,而println!宏则作了一点修改。
我们在每个使用的print!宏前面添加了$crate变量。这样我们在只需要使用println!时,不必也编写代码导入print!宏。
首先是关于
_print函数:我们在静态变量
WRITER中引入了自旋锁,而_print函数调用时,将通过.lock来完成对WRITER锁的占有。同时_print函数并调用它的write_fmt方法。这个方法是从名为Write的特性中获得的,所以我们需要导入这个特性。额外的unwrap()函数将在打印不成功的时候panic;但实际上我们的write_str总是返回Ok,这种情况不应该发生。考虑到这个函数是一个私有的实现细节,我们添加一个doc(hidden)属性,防止它在生成的文档中出现。(事实上这个实验也不会去生成文档)
根据声明宏的定义,我们为两个宏都添加了#[macro_export]属性,这样在包的其它地方也可以使用它们。
需要注意的是,这将占用包的根命名空间
(root namespace),所以我们调用不能通过use crate::uart_console::print来导入,也不能直接通过crate::uart_console::print!()来调用它。故,我们应该使用
use crate::print导入或直接通过crate::print!()进行调用。
调用宏并测试
我们不再以额外文件include!的方式添加到main.rs,而是将其作为模块导入。
我们删除上一节中main.rs的测试代码,然后修改成如下(最终完整的main.rs文件)
// 不使用标准库 |
并在src/uart_console.rs开头导入fmt和ptr库
use core::{fmt, ptr}; |
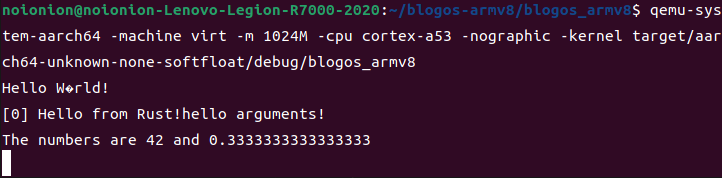
然后编译运行:
cargo build |
